
ДРУГИ СЕМИНАРСКИ РАБОТИ
- ИНФОРМАЦИОНИ СИСТЕМИ: |
Преглед на зголемената реалност
(АR-Augmented Reality)
Овде ќе го разгледаме полето на зголемената реалност, каде 3-D витуелните објекти се интегрирани во вистинска 3-D околина во реално време. Ги опишува медицинските, производните визуелните, планските, забавните и воените аппликации кои се истражуваат. Се опишуваат карактеристиките на системите на зголемена реалност, вклучувајќи и детална дискусија за балансот помеѓу оптичките и видео пристапите на спојување. Регистрацијата и забележувањето на грешките се два најголеми проблеми во градењето на ефективни системи на зголемена реалност, и овде ќе се разгледаат моменталните напори за да се надминат овие проблеми. Овој преглед претставува почетна точка за секој кој е заинтересиран за истражување или користење на зголемена реалност.
1. Запознавање
1.1 Цели
Оваа семинарска врши преглед на моментално најмодерните пристапи во зголемената
реалност. Ја опишува работата на различни сајтови и ги објаснува проблемите
кои се сретнуваат при градењето на системите за зголемената реалност.
Ги сумаризира разликите и пристапите кои се преземаат за да се надминат
овие проблеми и шпекулира на идните насоки кои заслужуваат истражување.
Набљудувањето ни презентира нови истражувачки резултати. Придонесот доаѓа
преку обединувањето на постоечката информација од многу извори. Првиот
дел објснува што е зголемена реалност и кои се мотивациите за развојот
на технологијата. Шесте класи кои се разгледани за можна аликација се
опишани во вториот дел. Третиот дел ги дискутира проблемите при градењето
на систем за зголемена реалност. Моментално два најголеми проблеми се
регистрацијата и чувството.
1.2 Дефиниција
Зголемената реалност (AR) е варијација на Виртуелната околина (VE), или како што е попозната Виртуелна реалност. VE технологиите комплетно го внесуваат корисникот во синтетичка околина. Додека е внатре, корисникот не може да го набљудува вистинскиот свет околу себе. Спротивно на тоа AR дозволува коисникот да го гледа вистинскиот свет, со виртуелни објекти поставени над или споени со реалниот свет. Затоа AR ја дополнува реалноста, наместо целосно да ја заменува. Идеално, за корисникот ќе изгледа дека реалните и виртуелните објекти постојат во истиот простор. Слика 1. покажува пример како може ова да изгледа. Прикажано е вистинско биро и вистински телефон. Во собата има виртуелна ламба и две виртуелни столици. AR може да се гледа како средиште помеѓу VE (комплетна синтетика) и комплетната реалност.

Слика 1: Вистинско биро со виртуелна ламба и две виртуелни столици
За да се одбегне ограничување на AR со специфични технологии, овој преглед
ја дефинира AR како систем кој ги има следните три карактеристики:
1) Комбинира реалност и виртуелност
2) Интеракција во реално време
3) Се разгледува во 3-D
Оваа дефиниција овозможува користење на други технологии, покрај HMD (дисплеји
кои се носат на главата), при што ги задржува основните компоненти на
AR. На пример, не вклучува филм или 2-D слоеви. 2-D виртуелните слоеви
над снимка во живо можат да се направат интерактивно, но слоевите не се
комбинирани во реалниот свет во 3-D. Сепак оваа дефиниција овозможува
интерфејси базирани на монитори, системи со дисплеи за едно око, проѕирни
HMD, и разни комбинации на технологии.
1.3 Мотивација
Зошто е зголемената реалност интересна тема? Зошто е комбинирањето на
вистински и виртуелни објекти во 3-D корисно? Зголемената реалност ја
подобрува перцепцијата на корисникот и неговата интеракција со вистинскиот
свет. Виртуелните објекти прикажуваат информации кои корисникот не може
да ги забележе директно со своите сетила. Информацијата која се пренесува
му помага на корисникот да извршува задачи во вистинскиот свет.
Истражувани се барем шест класи на потенцијални апликации на AR: мадицински
визуелизации, одржување и поправка, забелешки, планирање на патеки, забава,
и навигација и одредување на цели на воени авиони.
2. Апликации
2.1 Медицина
Докторите можат да користат зголемена реалност за визуелизација и тренирање
при операција. Можно е да се соберат 3-D податоци за пациентот во реално
време, со користење на сензори како MRI, CT или ултразвук. Овие податоци
тогаш можат да се рендерираат и комбинираат во реално време со поглед
на вистинскиот пациент. Ова би му дало на на докторот рендгенски поглед
во внатрешноста на пациентот. Ова може да биде многу корисно при извршувањето
на минимална операција, што ја намалува траумата од операцијата со користење
на многу мали пресеци. Проблем на минималните техники е намалената можност
на докторот да гледа во пациентот, што ја прави операцијата потешка. AR
технологијата може да обезбеди внатрешен поглед без да има потреба од
големи резови.
AR исто така може да биде од помош при основни медицински визуелизациони
задачи во операционата соба. Хирурзите можат да откријат некои карактеристики
со голо око кои не можат да се забележат на MRI или CT скановите, и обратно.
AR им овозможува на хирурзите достапност до двата вида на податоци истовремено.
AR исто така може да биде многу корисна за тренинг. Виртуелните инструкции
можат да го потсетат новиот хирург на потребни чекори, без потребата да
се погледне настрана од пациентот за да се консултира со прирачник. Виртуелните
објекти исто така можат да идентификуваат органи и посебни локации кои
треба да се одбегнуваат.
Неколку проекти вршат истражувања во оваа област.

Слика 2: Виртуален фетус во матката на бремена жена
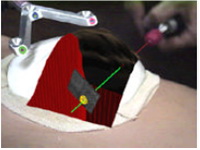
Слика 3: Модел на биопсија на тумор на дојката. 3-D графичко вметнување на игла.
2.2 Производство и поправка
Друга категорија за апликација на зголемената реалност е составувањето,
одржувањето и поправката на комплексни машини. Инструкциите можат полесно
да се разберат ако се достапни не како прирачници со текст и слики, туку
како 3-D цртежи поставени над висинската опрема, покажувајќи ги чекор
по чекор задачите кои треба да се направат и како треба да се извршат.
Овие 3-D цртежи можат да бидат анимирани, со што упатствата би биле уште
поексплицитни.
Неколку истражувачки проекти имаат демонстрирано прототипи во оваа област.
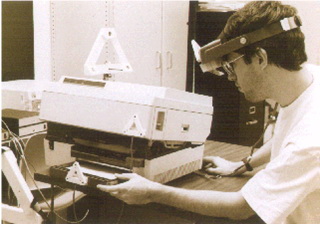
Слика 4: Надворешен поглед на апликацијата за одржување на печатачи. Мораат да се следат сите објекти.

Слика 5: Прототип на апликација за одржување на ласерски печатач, која покажува како да се извади држачот за хартија.

Слика 6: Adam Janin ја демонстрира апликацијата за составување на Боинг
ожичување.
2.3 Прибелешки и визуелизација
AR може да се користи за да се додадат забелешки за објектите или околината со јавна или приватна информација. Апликациите со јавна информација ги користат јавните бази на податоци за добивање на податоците. На пример, рачен дисплеј може да дава податоци за содржината на полиците на библиотеката кога корисникот оди по библиотеката.

Слика 7: Ознаките на деловите на моделот на мотор се појавуваат кога корисникот покажува кон нив.
Алтернативно, овие белешки можат да бидат приватни, прикачени за специфични објекти. На слика 8. е покажан прозорец прикачен како етикета на студент. Студентот носи направа за следење, па компјутерот ја знае неговата локација. Кога студентот се движи, етикетата ја следи неговата локација, и го потсетува AR корсиникот за што треба да зборува со студентот.

Слика 8: Прозорец прикажан врз специфични вистински објекти.

Слика 9: Виртуелните линии помагаат во прикажувањето на геометријата на шатлот, како што ќе изгледа во орбита
2.4 Планирање на движење на роботи
Далечинското управување на роботи често претставува проблем, особено кога роботот е далеку, со долги одложувања во комуникацијата. Во овие услови наместо директно контролирање на роботот, може да е подобро да се контролира виртуелна верзија на роботот. Корисникот ги планира и специфицира движењата на роботот со манипулирање на локална виртуелна верзија во вистинско време. Резултатите се директно прикажани во реално време. Кога планот е тестиран и точно одреден, корисникот му кажува на вистинскиот робот да го изврши зададениот план. Виртуелната верзија исто така може да изврши предвидувања на ефектите од манипулирањето со околината, со што служи како алат за планирање и преглед.
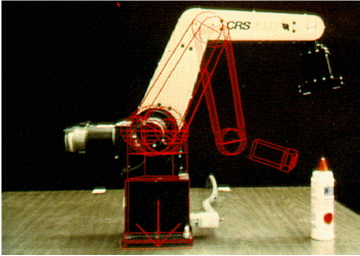
Слика 10: Виртуелните линии го покажуваат планираното движење на раката на роботот
2.5 Забава
Неколку егзибиционери имаат покажано “Виртуелни сетови” кои ги спојуваат вистинските актери си виртуелни позадини, во вистинско време и во 3-D. Актерите стојат пред голем син екран, додека компјутерски контролирана подвижна камера ја снима сцената. Бидејќи локацијата на камерата ги следи и движењата на актерите кои се кореографски, можно е ддигитално да се постави актер во 3-D виртуелна позадина. Индустријата го гледа ова како начин да ги намали трошоците за продукција.
2.6 Воени авиони
Многу години воените авиони и хелокоптери користеле посебни дисплеи монтирани на кацигите за да ја постават векторската графика над погледот на пилотот. Покрај обезбедувањето на основна навигација и информација на летот, овие графици некогаш ги регистрираат метите во околината, обезбедувајќи начин на одредување на насоката на оружјата.
3. Карактеристики
3.1 Додавање
Покрај додавањето на објекти во вистинската околина, зголемената реалност има можност и да ги отстранува. На пример, отстранување на биро од вистинската околина, цртање на репрезентација на вистински ѕидови и подови зад бирото. Досега истражувачите се фокусирале на спојувањето на виртуелни и реални слики и графики. Сепак AR може да се прошири за да вклучува и звук. Корисникот треба да носи слушалки опремени со микрофон однадвор. Слушалките би додавале синтетички, директен 3–D звук, додека надворешните микрофони би ги детектирале дојдовните звуци од околината. Тоа би му дало шанса на системот да маскира одредени вистински звуци од околината.
3.2 Оптика наспроти видео
Основна оклука при градењето на AR sсистем овозможува комбинирање
на реалното и виртуелното. Можни се два основни избори: оптички и видео
технологии. Секоја има свои предности и недостатоци.
Проѕирен HMD е една од уредите кои се користат за комбинирање на вистинскиот
и виртуелниот свет. Стандарден затворен HMD не би дозволил никаков директен
поглед од вистинскиот свет. Проѕирниот HMD му дозволува на корисникот
да го гледа вистинскиот свет, со виртуелни објекти наддадени со оптички
или видео технологии. Оптичките проѕирни HMD работат така што поставуваат
оптички делови пред очите на корисникот. Тие делови се делумно проѕирни,
па корисникот може да гледа низ нив кон вистинскиот свет.
Слика 11: Оптички поѕирен HMD концептен дијаграм

Слика 12: Два оптички дисплеи на главата HMD
Поѕирниот видео-HMD работи со комбинирање на затворен HMD со една или
две монтирани видео камери. Видео камерите му овозможуваат на корисникот
поглед од вистинскиот свет. Видеото од овие камери е комбинирано со графичките
слики креирани од генераторот на сцени, спојувајќи го реалното и виртуелното.
Резултатот се испраќа до мониторите пред очите на корисникот во затворениот
HMD.
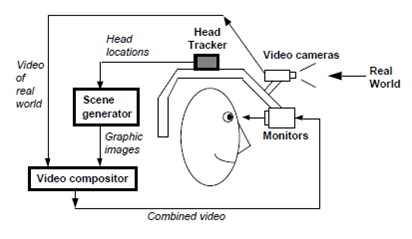
Слика 13: Проѕирен видео- HMD концептуален дијаграм

Слика 14: Вистински видео-HMD
Видео композицијата може да биде направена на повеќе од еден начин. Едноставен
нечин е користење на крома-клучеви, техника која се користи во многу специјални
ефекти. Позадината на компјутерсите слики е поставена на одредена боја,
како зелена, која не се користи кај виртуелните објекти. Тогаш чекорот
за комбинирање ги заменува сите зелени делови со соодветните делови од
видеото од вистинскиот свет. Пософистицираните композиции користат информации
за длабочината. Ако системот има информација за длабочината на секој пиксел
во сликите од вистинскиот свет, може да ги комбинира реалните и виртуелните
слики со пиксел по пиксел споредба на длабочината.
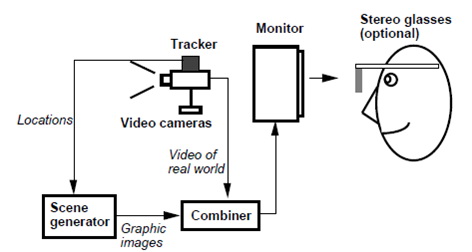
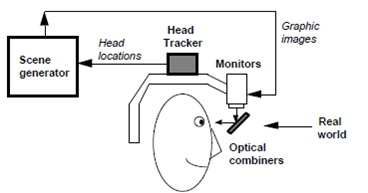
Слика 15: Концептуален дијаграм на мониторски базиран AR
Слика 16: Надворешен поглед на ARGOS систем, пример на мониторски базиран AR
Исто така е можна мониторски базирана оптичка конфигурација. Мониторите
и наочарите се фиксирани во просторот, и корисникот ја поставува главата
за да гледа низ наочарите.
Има многу споредби на релативните предност и недостатоци на оптичките
и видео пристапите. Некои од нив се:
1) Едноставност: Оптичкото спојување а поедноставно од видео спојувањето. Оптичкиот пристап има само еден дел за кој треба да се грижи: графичките слики. Вистинскиот свет се гледа директно, и времето на одложување е само неколку нано секунди. Видео спојувањето, пак, мора да работи со неколку видео делови за реалните и виртуелните слики, при што секој дел има одредено задоцнување. Дигитализирањето на видео сликите обично додава најмалку една временска рамка на одложувањето. Видео камерите речиси секогаш имаат одредено искривување за кое мора да се компензира, заедно со искривувањето кое се јавува од оптиката пред направите за дисплеј. Бидејќи видеото има многу поголеми побарувачки е многу поскапо и покомплицирано за изработка во споредба со оптички базираните системи.
2) Резолуција: Видео спојувањето ја ограничува резолуцијата од она што го гледа корисникот, и реалнот и виртуелно, до резолуцијата на деловите за дисплеј. Опитичките апарати исто така ги покажуваат сликите со резолуцијата на дисплејот, но погледот на корисникот не е искривен.
3) Безбедност: Поширните видео-HMD се всушност модифицирано затворени HMD. Ако напојувањето се исклучи, корисникот е ефективно слеп. Ова е безбедносна грижа на некои апликации. А кога напојувањето ќе се исклучи на оптички поѕирен HMD, корисникот уште има директен поглед од вистинскиот свет.
4) Немање на можност за промена на погледот: Со видеото, погледот на корисникот кон реалниот свет е обезбеден од видео камери. Ова, го поставува ‘очите’ на корисникот каде и да се видео камерите. Во повеќето конфигурации, камерите не се поставени на истото место кон каде што би гледале очите и се создава дисликација помеѓу камерите и очите. Оваа разлика помеѓу локацијата на камерата и локацијата на очите произведува отстапување помеѓу она што корисникот ќе го види во споредба со она што очекува да види. На пример ако камерите со поставени над очите на корисникот, тој ќе го гледа светот од гледна тоќка која е повисока од точката на која тој е навикнат. Овој проблем може да се надмине со додавање на огледала кои ќе создадат дополнителни оптички патеки, меѓутоа ова додава значителна комплексност на HMD дизајнот.
Видео спојувањето ги нуди следните предности пред оптичкото спојување:
1) Флексибилност во стратегиите за спојување: основен
проблем на оптичките апарати е дека виртуелните објекти не можат целосно
да ги покријат реалните предмети. Изградбата на оптички поѕирен HMD кој
може селективно да го исклучува светлото од реалниот свет е тешка. Во
нормален оптички систем, објектите се дизајнирани да бидат во фокус на
само една точка на оптичката патека: окото на корисникот. Секој филтер
кој селективно би го блокирал светлото мора да биде поставен на оптичката
патека во точка каде сликата е во фокус, а тоа не може да биде корисничкото
око. Затоа оптичкиот систем ќе мора да има две места каде сликата ќе се
фокусира: во окото на корисникот и точката на филтерот. Не постојат оптички
HMD кои можат да ја блокираат светлината но овој начин. Затоа, виртуелните
објекти се појавуваат како духови и полу-проѕирни. Ова ја оштетува илузијата
на реалност.
Спротивно на ова, видео системите се пофлексибилни за начините на спојување
на реалните и виртуелните слики. Бидејќи и реалните и виртуелните делови
се достапни во дигитална форма, видео композиторите можат, на основа пиксел
по пиксел, да ги земат реалните, дигиталните или некоја комбинација од
тие делови.
2) Широко поле на поглед: Искривувањата во оптичките системи се функција од радиусната разлика од оптичката оска. Колку подалеку се гледа од центарот на погледот, толку е поголемо искривувањето. Дигитализирана слика земена преку искривен оптички систем може да се поправи со применување на техники за процесирање на слики. Ова бара значителна компјутерска работа, но тоа е ограничување би било незначително во иднина, како што компјутерите стануваат се побрзи. Потешко е да е изгради дисплеј со широко поле на поглед со оптички поѕирни техники. Сите искривувања на погледот на корисникот мора да се корегираат оптички, а не дигитално.
3) Реалните и виртуелните одложувања во погледот можат да бидат споени: Видеото нуди пристап за намалување или одбегнување на проблемите кои настануваат поради временски разлики помеѓу реалните и виртуелните слики. Оптичките HMD нудат моментален поглед кон вистинскиот свет но имаат закаснување на виртуелниот дел. Со видео пристапот, можно е да се одложи видеото на вистинскиот свет да одговара на каснењето на виртуелната снимка.
4) Додатни стартегии за регистрација: Во оптичките системи, единствената информација за локацијат на главата на корисникот доаѓа од сензорот на главата. Видео спојувањето овозможува втор извор на информација: дигитализираната слики од реалната сцена.
5) Полесно е да се изедначи светлост на реалните и виртуелните објекти.
И оптичките и видео технологиите имаа свои улоги, и изборот на технологијата зависи од барањата на апликацијата. Многу од механичките постројки и прототипови за поправка користат оптички пристапи, поради цената и безбедносните прашања. Повеќето прототипови за медицински апликации користат видео пристапи, поради можност за спојување на реалните и виртуелните делови како и понудените дополнителни стратегии за регистрација.
3.3 Фокус и контраст
Фокусот може да биде проблем и за оптичките и за видео пристапите. Во
идеален случај виртуелното треба да одговара на стварното. Во видео систем
комбинираната и виртуелната слика ќе бидат проицинирани на иста оддалеченост
од мониторот или HMD оптиката. Меѓутоа зависно од видео камерите длабочината
на полето и подесувањата на фокусот , делови од реалниот свет може да
не бидат во фокусот. Во типичен графички софтвер, се е изразено со pinhole
модел, така да сите графички објекти, без разлика на оддалеченост се во
фокусот. Значи, графиката може да изразува симулација на ограничена длабочина
на полето, и видеокамерите можат да имаат автофокусирачки леќи.
Во оптички случај, виртуелната слика е проицирана на некоја оддалеченост
од корисникот. Оваа оддалеченост може да се подеси или може да биде фиксна.
Поради тоа, додека стварните објекти се на различни оддалечености од корисникот,
сите виртуелни објекти се проицирани на исти оддалечености. Ако виртуелните
и стварните оддалечености не се поклопуваат за одредени предмети во кои
корисникот гледа, тој нема да може да ги гледа јасно двете истовремено.
Контрастот е друго прашање, заради големиот опсег во реалното окружување
и на она што човечкото око може да го детектира. Во идеален случај, светлината
од стварните и виртуелните предмети треба да се поклопува. За жал, во
најлош случај, тоа значи дека системот мора да ги усклади големиот број
на нивоа на светлина. Окото е логоритамски детектор , во кој светлината
со која може да се справи е околу единаесет нивоа распон поголема од најмалите
детектори, вклучувајќи ги тука темноадаптираните и светлоадаптираните
очи. Во било која состојба окото може да покрие околу шест нивоа величини.
Многу уреди за прикажување не можат да дојдат до ова ниво на контраст.
Ова е особено проблем на оптичките технологии, бидејќи корисникот има
директен поглед на реалниот свет. Ако стварната природа (окружување) е
премногу светла, тогаш ¬ќе се избледи виртуелната слика. Ако реалната
природа е премногу темна, виртуелната слика ќе го избледи реалниот свет.
Проблемите со контрастот не се толку сериозни како оние со видеото, бидејќи
видео камерите имаат ограничени динамички одговори, и погледот на двете,
реалното и виртуелното е генериран од мониторот , па сè мора да биде потскратено
или компримирано во динамичкиот опсег на мониторот.
3.4 Подвижност
Во скоро сите системи на виртуелната природа, корисникот не е охрабрен за да бара многу. Наместо тоа , корисникот управува со „летање” низ природата, одејќи по подвижна лента за трчање или возејќи некој модел на возило кој се користи во научни цели, демонстрација или промоција. Без разлика каква е технологијата, резултатот е дека корисникот седи на едно место во реалниот свет. Некои AR (Аugmented Reality) апликации , како и да е , ќе треба да поддржат корисник кој ќе оди околу голема околина. Проширената реалност бара од корисникот да биде на местото каде треба да се одржи зададената задача. „Летањето” изведено во системот на виртуелната природа не е повеќе опција. Ако механичарот треба да оди на другата страна од млазниот мотор, таа мора да се задвижи самата со сите уреди за прикажување кои ги носи со неа. Затоа системите на проширената реалност ќе имаат најмногу подвижност, посебно способноста да одат околу во природата,надвор од контролираната средина. Сценскиот генератор или HMD и системот за пратење мора да ги содржат сите делови и да бидат способни за изложување на преживување во околината. Ако оваа можност е остварена, многу повеќе апликации кои не биле пробани ќе станат достапни. На пример, можноста за обележување на околината која ги опкружува, може да биде корисна за војниците, шетачите, или туристите кога се во некоја нова непозната локација.
3.5 Споредба наспроти виртуелната околина
Севкупните барања на проширената реалност може да биде резимирано со споредување на барањата наспроти барањата на виртуелната природа, за сите три базични субсистеми кои што тие ги бараат.
1). Сценски генератор- Преведувањето не е моментално еден од најголемите проблеми на проширената реалност. Системите на виртуелните средини имаат повисоки барања за реалните слики затоа што тие комплетно го заменуваат реалниот свет со виртуелната средина. Во проширената реалност, виртуалните слики само го дополнуваат реалниот свет. Затоа некои виртуелни објекти мора да бидат нацртани, и тие не мора да бидат реалистично изразени со цел да служат за намените на апликацијата. На пример, во апликациите, текст и 3-D рамки, цртежите може да бидат доволни. Идеално, фотореалистичните графички објекти би биле ненаметливо споени со реалната природа , но најпрво мора да се решат многу побазични проблеми.
2) Уред за прикажување- Уредите за прикажување користени
во проширената реалност
Може да имаат помалку строги барања него што имаат системите на виртуелната
околина,бидејќи проширената реалност не го заменува реалниот свет. На
пример монохроматските дисплеи може да бидат адекватни за некои апликации
на проширената реалност, додека виртуелно сите системи на виртуелната
средина денес користат заситени бои. Оптичките дисплеи за на глава (HMD)
кои гледаат со мало поле на гледање можат да бидат задоволувачки бидејќи
корисникот може сеуште да го види реалниот свет со неговата периферна
визија. Гледањето низ HMD не го затвора полето на нормално гледање на
корисникот. Понатаму, резолуцијата на мониторот во оптичкото гледање низ
дисплејот може да биде пониска него што корисникот ќе толерира во оваа
апликација на виртуелната природа, се додека оптичкиот дисплеј на главата
HMD (head-mounted display) не ја редуцира резолуцијата на реалната природа.
3) Пратење и отчитување: Додека во претходните два случаи проширената реалност има пониски и помали барања од виртуелната средина, тоа не е случај за пратењето и отчитувањето. Во овој дел,барањата на проширената реалност се многу построги од оние во системите на виртуелната околина. Поголем проблем за ова е проблемот со регистрирање, кој е опишан во следниот дел. Други фактори кои ги прават барањата на пратењето и отчитувањето построги се опишани понатаму.
4. Регистрација
4.1 Проблем на регистрација
Еден од најбазичните проблеми кој ја ограничува проширената реалност е
проблемот на регистрација. Предметите во реалниот и виртуелниот свет мора
да бидат точно ускладени едно спрема друго, или илузијата дека двата света
ќе коегзистираат ќе биде компромисен. Уште посериозно, многу апликации
бараат исправни регистрации. На пример, потсетете се на примена на игла
при биопсија. Ако виртуелниот предмет не е каде што е туморот, хирургот
ќе го промаши туморот и биопсијата нема да успее. Без точна регистрација,
проширената реалност нема да биде прифатена во многу апликации.
Проблемите со регистрирањето исто така постојат во виртуелната природа,
но не се ни одблиску толку сериозни бидејќи тие се многу потешки за детектирање
него во проширената реалност. Се додека корисникот гледа виртуелни објекти
во апликации на виртуелната природа, грешките при регистрација резултираат
во видео- кинетички и визуелно- лиценцирани конфликти. Вакви конфликти
помеѓу различни човечки значења може да биде извор на болест на движења.
Бидејќи кинетичките и лиценцираните системи се помалку чувствителни од
визуелниот систем,визуелно – кинетичките и визуелно лиценцираните проблеми
се помалку забележувачки него визуелните проблеми. На пример, ако корисникот
носи дисплеј на главата со затворен поглед може да ја држи вистинската
рака, а да гледа виртуелна рака.Виртуелната рака треба да биде прикажана
каде корисникот може да ја види реалната рака, ако не носи дисплеј на
главата.Но ако виртуелната рака е грешно поставена за 5 мм, корисникот
нама да може да детектира, освен ако активно не бара таква грешка. Истата
грешка е исто така повеќе очигледна ако се гледа низ дисплеј, каде проблемот
е визуелно- визуелен.
Понатаму, еден феномен наречен визуелно ловење прави уште потешко да е
детектирањето на вакви грешки при регистрирање. Визуелното ловење е напор
на мозокот да верува на тоа што го гледа него на она што го чувствува,
слуша итн. Тоа е визуелна информација која се стерми да ги надмини сите
други сетила. Кога се гледа телевиски програм, гледачот верува дека сите
звуци излегуваат од устите на актерите, иако тие доаѓаат од звучникот
во телевизорот. Вентролокизмот функционира заради визуелното ловење. Слично,
корисникот може да верува дека раката е онаму каде виртуелната рака се
прикажува, него што вистинската рака е, заради визуелното ловење. Овој
ефект ги зголемува грешките при регистрација што може да се толерираат
во системите на виртуелната порирода. Ако грешките се систематски корисникот
може да се адаптираат на новата околина, давајќи долго време на изложеност
од неколку часа или дена.
Проширената реалност бара многу потошна регистрација него виртуелната
околина. Замисли го истото сценарио накорисник кој држи рака, но овој
пат носејќи дисплеј на главата. Грешките при регистрација сега резултираат
со визуелно – визуелни ефекти помеѓу сликите на виртуелната и реалната
рака. Овие конфликти е лесно да се детектираат поради резолуцијата на
човечкото око и чувствителниот визуелен систем на човекот за разликите.
Дури и мали израмнувања во сликите на реалниот и визуелниот свет се лесни
за детектирање.
Регистрацијата на реалните и виртуелните слики не е ограничено на проширената
реалност. Специјалните ефекти на актерите доаѓаат од компјутерски генерирани
3-Д објекти од живите актери во филмот и видеото. Разликата е во количината
на контрола која е достапна. Во филмот, и режисерот може да вниметално
ја испланира секоја слика, и актерите да поминат часови обидувајќи се
да постигнат одредена слика, за да остварат перфектна регистрација. Интерактивниот
медиум, проширената реалност е многу потешка за работа. Системот на проширената
реалност не може да ги контролира движењата на дисплејот на главата. Корисникот
гледа каде што сака , и системот мора да одговори за време од милисекунди.
Грешките при регистрација е тешко да се контролираат поради огромните
барања и поради големите извори на грешки. Овие извори на грешки може
да се поделат на два типа статички и динамички. Статичките грешки се оние
кои предизвикуваат грешки при регистрација и тогаш кога гледното поле
на корисникот на предметите од околината останува и понатаму во потполност.
Динамичките грешки се оние кои немаат ефект се додека гледната точка на
сликите ќе почни да се движи.
За денешните системи базирани на HMD , динамичките грешки се далеку најголеми
соработници на грешките при регистрација, но и статичките грешки не можат
да се игнорираат. Понатаму накратко ќе се резгледаат статичките и динамичките
грешки и што е направено до сега за да се редуцираат.
4.2 Статички грешки
Четирите извори на статички грешки се:
- оптичка дисторзија
- Грешки во системот за пратење
- Механичка непорамнетост
- грешно гледање на параметрите ( пример, поле на гледање, пратечка позиција
на окото)
1) Оптичка дисторзија - Оптичката дисторзија постои
во многу камери и системи од леќи, и поради дисторзијата која е функција
од радијалната оддалеченост од оптичката оска, дисплеите на широкото поле
на гледање може да бидат релативно ранливи на оваа грешка. Оптичките дисторзии
се најчесто систематски грешки кои лесно може да бидат лоцирани и компензирани.
Ова лоцирање може да не биди тривијално, но често и тоа е можно.
2) Грешки восистемот за пратење – Овие грешки се најчесто
најсериозните грешки на статичката регистрација. Овие дисторзии не се
лесни за лоцирање и елиминирање ,а исто и за мерење, бидејќи бараат уште
еден т.н 3-D мерач. Овие грешки се неајчесто несистематски и тешко е да
се карактеризираат. Скоро сите сите системи за пратење, кои се комерцијално
достапни не се доволно способни за да ги задовалат барањата на проширената
реалност.
3) Механички непорамнетости – Механичките непорамнетости
имаат отстапувања помеѓу специфираниот модел на хардверот и актуелните
физички карактеристики на реалниот систем.
4) Неточни параметри на гледање – Неточните параметри
на гледање се последен изворна грешките при статичка регистрација, може
да се сметаат за специјален случај на грешки при порамнување каде баждарењето
може да биде применето. Параметрите на гледање го специфираат местото
на камерата во гледањето на матрици кои се користат од страна на сценскиот
генератор за да ги нацртаат графичките слики.
За систем базиран на HMD, овие параметри вклучуваат :
-центар на проекцијата и и димензии на патиштата на гледање;
-ускладување, и во преводот и во ориентацијата, помеѓу локацијата на главата
за пратење и очите на корисникот;
- поле на гледање .
Неточните параметри на гледање може да предизвикаат систематски статички грешки. Земете го примерот на системот за пратење лоциран над очите на корисникот. Ако вертикалните порамнувања помеѓу уредот што прати и очите се многу мали, сите виртуелни објекти ќе се појавуваат пониски него што се навистина.
4.3 Динамички грешки
Се случуваат поради систем на задоцнувања или заостанувања. Системот на
задоцнувања крај со крај е дефиниран како разлика меѓу моментот кога пратечкиот
систем ја мери позицијата и ориентацијата до моментот кога генерираните
слики соодговараат на таа позиција и ориентацијата се покажува на дисплејот.
Овие задоцнувања постојат бидејќи секоја компонанта на проширената реалност
бара некое време за да си ја врши својата работа. Задоцнувањата во субсистемот
за пратење, задоцнувањата во комуникацијата , времето што се зема додека
сценскиот генератор ги нацрта соодветните имиџи на амортизери со рамка
, и времето потрошено на скенирање од амортизерот на рамката до прикажувањето
се укажува на контрибутот крај со крај заостанување. Заостанувањата крај
со крај од 100 милисекунди се типични за системите кои што постојат.Заостанувањата
од 250 милисекунди или повеќе може да постојат на пониски , потешки полнења,
како системските мрежи.
Заостанувањата на системот можат да предизвикаат грешки при регистрација
само кога се случува движење. Да претпоставиме дека гледната точка и сите
предмети осатнуваат мирни.Заостанувањето тогаш не предизвикува грешка
при регистрација. Нема врска колку ќе биди заостанувањето, сликите кои
се генерирани се одредени, се додека ништо не е помрднато додека да се
земи мерењето.
Во фигурата 17 сликата лево покажува како изгледа регистрирањето кога
сè седи мирно, кога сите елементи се неподвижни. Виртуелниот гриав трапезоиден
дел покажува што скенира ултразвучното стапче. Тојнестварен трапезоид
треба да биде ставен или вграден на крајот од реалното ултразвучно стапче.
Сликата десно покажува некое движење.
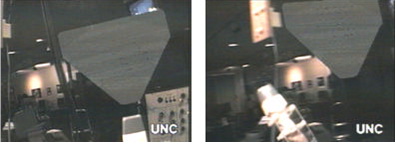
Сл.17. Ефект на движење и системски заостанувања при регистрација. Сликата
лево е статичка(неподвижна) сцена. Сликата десно прикажува сцена на движење
4.4 Техники базирани на видео
Mike Bajura и Ulrich Neumann сфатија дека регистрацијата која е базирана на информацијата на системот за пратење е као градење на „отворено повторување” контролер. Системот нема повратна спрега на колку блиску се реалното и замисленото. Без повратна врска многу е тешко да се гради систем кој исполнува перфектна врска. Како и да е , приодот на видео- базираните системи може да користи слика со процесирање или со компјутерска видео техника за да ја потпомогне регистрацијата. Се додека видео-базираните проширени реалности имаат реална слика изразена во броеви, можно е да детектираат делови од реалноста и да се искористат тие за да се извршува регистрирањето (запишувањето). Ова тие го викаат пристапување на затворено повторување, додека сликата претсавена со бројки обезбедува механизам за доведување на повратна врска во системот. Сл.18 земена од [Bajura95], покажува виртуелна стрела и виртуелен оџак израмнети во нивните посакувани точки на два реални објекти. Секој од реалните објекти има LED (light-emitting diode)- диода која емитира светлина, за да потпомага во регистрацијата. Сл.19 до сл.21: се покажува регистрирање кое користи точки со кружни модели како доверители. Регистрирањето е исто така блиску до перфектно. Сликата 22 демонстрира спојување на нереални предмети со вистинската околина, користејќи обоени точки како доверители во во видео-базираното достигнување. На сликата лево, множеството карти кои се во средината се реални, а другите десно се замислени.

Слика 18 Виртуелна стрела и виртуелен оџак израмнети
со два реални објекти.
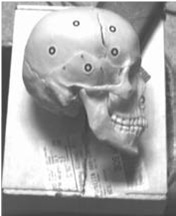
Слика 19 Вистински череп со 5 замислени точки
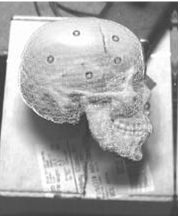
Слика 20.Виртуелна рамка на череп регистриран со вистински делови од череп

Слика 21. Виртуелна рамка на череп регистриран со вистински череп кој е придвижен кон друга позиции
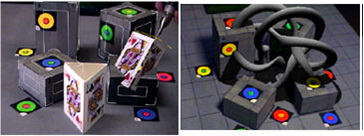
Слика 22. Виртуелни карти и спирални предмети споени со реални блокови и табели
Заклучок
Проширената реалност е далеку зад Виртуелните околини во целост. Неколку
комерцијални продавачи продаваат комплетни системи за Виртуелна околина.
Како и да е, денес нема продавачи кои продаваат системи базирани на HMD
во проширената реалност. Некои монитори базирани на виртуелно местење
се достапни,но денес системите на проширената реалност примарно се наoѓаат
во академски и индустриски лабаратории.
Првите ангажирани системи базирани на HMD во проширената реалност најверојатно
прво ќе се искористат за во воздушната индустрија. Both Boeing и McDonnell
Douglas ја проучуваат оваа технологија. Претходното користи достигнувања
од оптиката, а подоцното користи видео достигнувања. Boeing го воведе
ова користејќи прототип систем, но сеуште нема направено решенија за воведување.
Апликациите на анотациите и визуализацијата се ограничени, околините со
лимитирано ниво денес се развиени, иако многу повеќе работа е потребна
за да имаат ефективна и флексибилна цена.
Примената во медицинската визуализација ќе потрае подолго. Прототипската
визуализација и нејзините средства кои служат за припомош се користени
за експериментални бази, но строгите барања за регистрација и разгрануваните
грешки ќе ги одложат општите употреби за многу години. Проширената реалност
ќе биде искористена за медицинско образование пред вообичаено што се користи
во хирургијата.
Прва примена на ова може да се најде во навигациската припомош за луѓе
кои одат на отворено. Овие индивидуи можат да бидат војници кои напредуваат
во нивната цел, шетачи кои се изгубиле во шумата, или упатства за туристи
кои ја бараат нивната барана дестинација. Денес, овие поединци мора да
ја извадат физичката мапа и да го поврзат она што го гледаат со реалната
околина околу нив на 2-D мапата. Ако ориентирните точки не се распознавват
толку лесно, ова многу тешко ќе биде за изведба, и секој кој бил изгубен
во шума ќе може да посведочи. Еден систем на проширената реалност ја прави
ориентацијата полесна заради здружување на автоматски чекор. Ако позицијата
на чекорот и ориентацијата се познати , и системот на проширената реалност
има пристап на дигиталната мапа на ова подрачје, потоа системот на проширената
реалност може да ја нацрта 3-D директно на погледот на корисникот. Ако
корисникот во положбата во која се наоѓа има пристап и до дигитална мапа
на ова подрачје, па потоа и системот на проширената реалност може да извлече
карта во 3-D директно на погледот на корисникот. Корисникот ја гледа ближната
планина и го гледа графикот кој објаснува кое е името на планината, колку
е висока и колку далеку е тоа и каде е стазата која води до врвот.
Друга апликација е визуализација на локациите и настаните како тие да
биле во минатото или како тие да ќе се случут после иднината и промените
кои ќе се изведат. Туристите кои посетуваат историски места како Полето
на цивилната војна на Акрополис, во Атина , не ги гледаат тие локации
како да се дел од минатото , со оглед на промените со текот на времето.
Многу е тешко за еден посетител да замисли дали овие локации во минатото
навистина личеле на она што се денес.
Откако се решени основните проблеми на проширената реалност, крајната
цел ќе биде да се создаваат виртуални предмети кои се толку реалистични
што не се ни приметуваат во реалната околина.Фотореализмот го покажа тоа
во играните филмови , но овде тоа е многу потешко. Осветлувањата, површините
на размислувањето и други својства мора да се мерат автоматски во реалното
време.
Регистрацијата мора да биде готово совршена, без рачни интервенции и прилагодувања.
Иако тоа се тешки проблеми, тие веројатно е дека се решливи. Било потребно
околу 25 години напредок за цртање фигури на екранот за да може да конструираат
и еден фотореалистичен диносаурус во Јура парк. За други 25 години би
требало да бидеме во можност да носиме пар очила на проширената реалност
и да видиме со нив една интеракција на фотореалистичен диносаурус кој
јаде едно стебло во нашиот двор.
Користена литература:
Сите материјали се користени од интернет и можат да се најдат на следните страни од World Wide Web:
Columbia U. http://www.cs.columbia.edu/graphics/
ECRC http://www.ecrc.de/
MIT AI Lab http://www.ai.mit.edu/
UNC Chapel Hill http://www.cs.unc.edu/
U. Toronto http://vered.rose.utoronto.ca/etc-lab.html/
Download СЕМИНАРСКА РАБОТА у wordu » » »

Besplatni Seminarski Radovi - Бесплатно семинарска работа